UCLA BMES Build Team
Workshop 3 - ESP32 Analog
Activity 2 - Servo Motors
Task:
- Program the Servo to sweep back and forth automatically
- Use a potentiometer or joystick to it to control the servo manually
- Initializing Servo (above setup)
#include <Servo.h> Servo myservo; - Relevant functions
myservo.attach(pin) myservo.write(angle) - Revelant Components
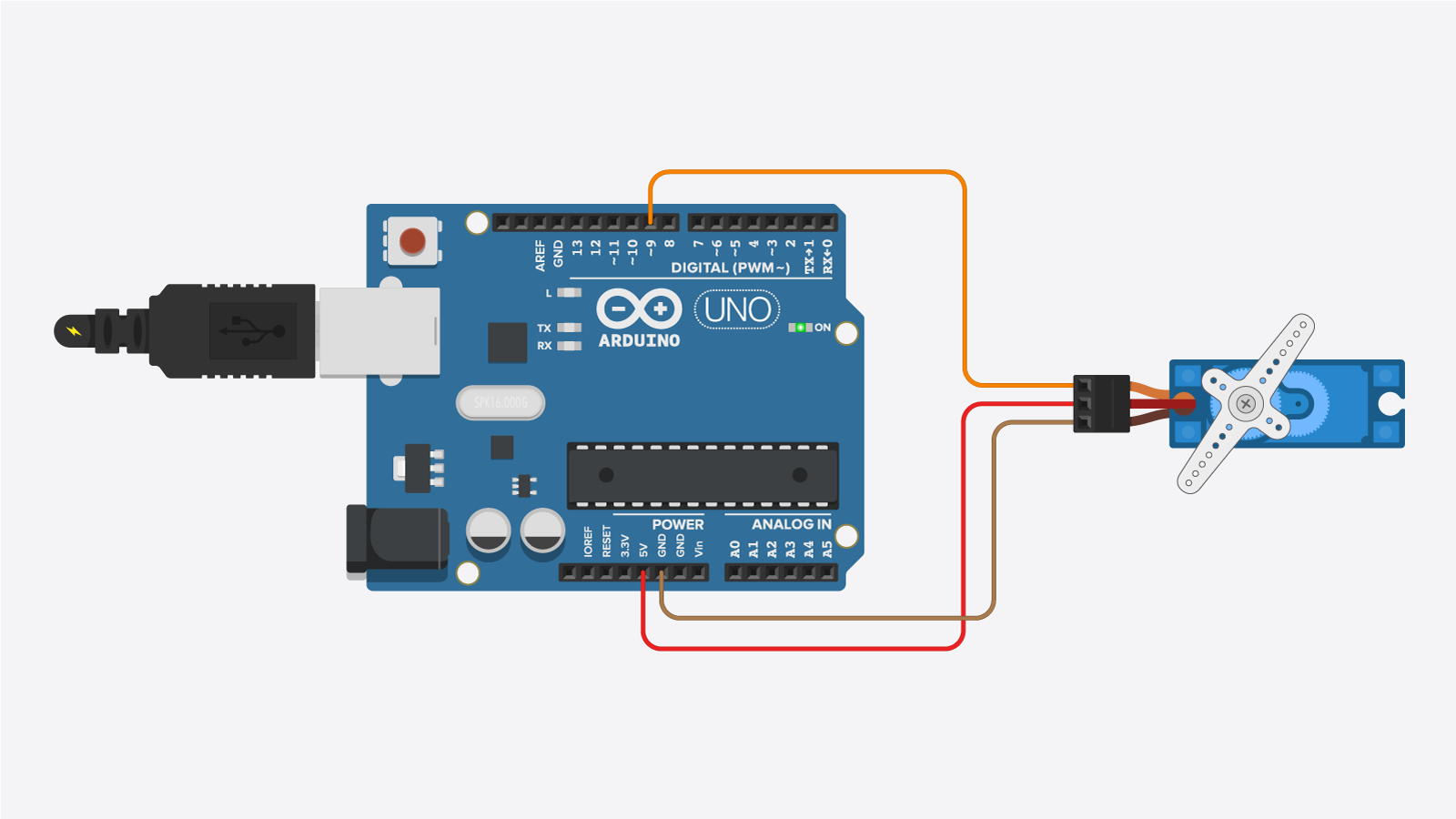
- Servo:
- Joystick:
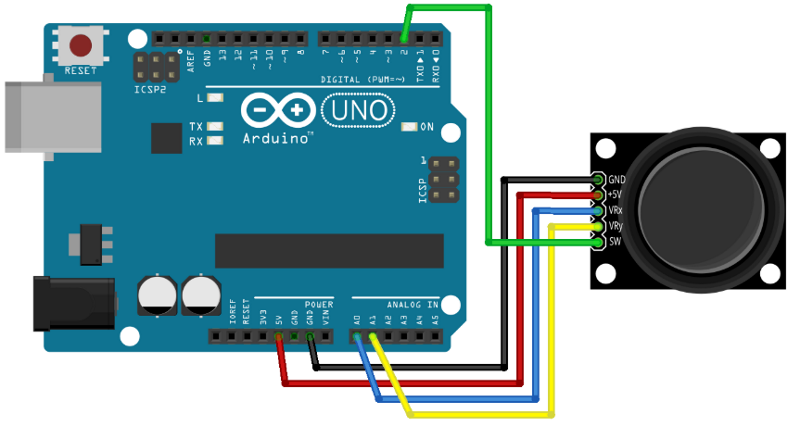
Practice searching online for how to wire and code a joystick, then try to incorporate it into your code to achieve the same function. Some useful links: https://www.instructables.com/Connect-and-Use-Joystick-With-Arduino/, https://lastminuteengineers.com/joystick-interfacing-arduino-processing/
Hint: only need to use 1 rotation axis of the joystick
- Servo:
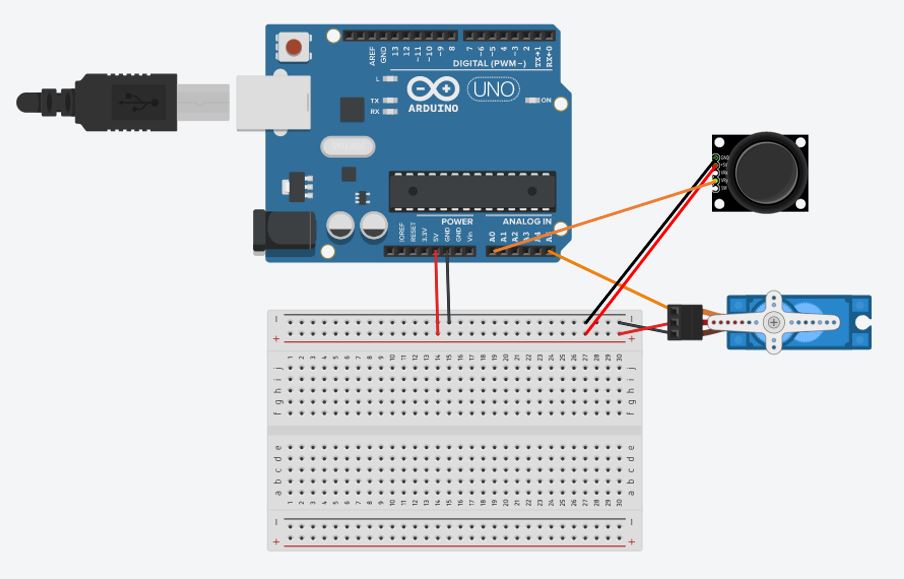
Circuit:
Code to Automatically Sweep Servo:
#include<Servo.h>
Servo Right;
bool current = false;
int rotation = 0;
void setup() {
Right.attach(A5);
Serial.begin(9600);
}
void loop()
{
for (int i = 0; i <= 180 ; i++)
{
if (rotation%2==0)
{Right.write(i);}
else
{Right.write(180-i);}
delay(10);
}
rotation++;
}
Code to Manually Control Servo with Joystick:
#include<Servo.h>
Servo Right;
int joyY = A0; // analog pin used to connect the Y - axis of Joystick
int y; // variables to read the values from the analog pins
void setup() {
Right.attach(A5);
Serial.begin(9600);
}
void loop() {
y = joyY; // reads the value of the Joystick's Y - axis (value between 0 and 1023)
y = map(analogRead(joyY),0,1023, 0, 180);
Right.write(y);
delay(15);
}