#include <Servo.h>
Servo myservo;
int watch = 0; //Keeps track of time so code can run w/o delays
int pos = 0;
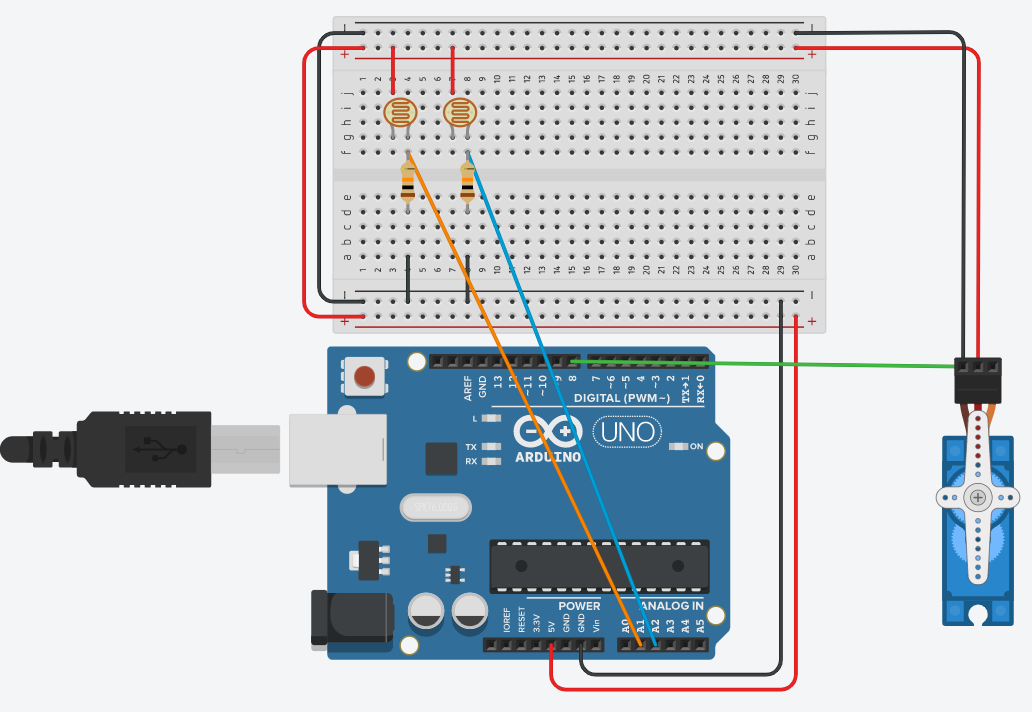
int backgroundPin = A1;
int obstaclePin = A2;
const int elementCount = 100; //elementCount refers to number of readings used
int avgBackgroundArray[elementCount]; //to calibrate the photoresistors.
int avgObstacleArray[elementCount];
float avgBackground = 0;
float avgObstacle = 0;
float tolerance = 0;
int differenceObstacle;
int differenceBackground;
void setup() {
myservo.attach(8); //Operate the Servo using pin 8
myservo.write(0); //Write Servo to position 0
Serial.begin(9600);
Serial.println("Calibrating photoresistors ...");
for (int i = 0; i < elementCount; i++) { //Collect photoresistor calibration data
avgBackgroundArray[i] = analogRead(backgroundPin);
avgObstacleArray[i] = analogRead(obstaclePin);
avgBackgroundArray[i] = map(avgBackgroundArray[i], 0, 10, 0, 100); //Map the data to a more intelligible range
avgObstacleArray[i] = map(avgObstacleArray[i], 0, 10, 0, 100);
delay(15);
}
for (int i = 0; i < elementCount; i++) { //Take the average of the calibration data
avgBackground = avgBackground + avgBackgroundArray[i];
avgObstacle = avgObstacle + avgObstacleArray[i];
if (i == elementCount - 1) {
avgBackground = avgBackground / elementCount;
avgObstacle = avgObstacle / elementCount;
}
}
Serial.print("avgBackground: ");
Serial.println(avgBackground);
Serial.print("avgObstacle: ");
Serial.println(avgObstacle);
avgBackground = round(avgBackground); //Round the calibration data
avgObstacle = round(avgObstacle);
Serial.print("Rounded avgBackground: ");
Serial.println(avgBackground);
Serial.print("Rounded avgObstacle: ");
Serial.println(avgObstacle);
Serial.println("Please enter tolerance level"); //User inputs tolerance level, recommended to be at around 100.
while (tolerance == 0) { //The tolerance level is compared with the difference between the
if (Serial.available() > 0) { //photoresistors' current readings and the calibration data average.
tolerance = Serial.parseFloat(); //The tolerance is a float, so use Serial.parseFloat() to collect user input.
}
}
Serial.print("Tolerance: ");
Serial.println(tolerance);
delay(2000); //Gives user time to read output information
}
void jump() {
myservo.write(40);
watch = 0; //Resets time since last jump
}
void loop() {
int background = analogRead(backgroundPin);
int obstacle = analogRead(obstaclePin);
background = map(background, 0, 10, 0, 100); //Maps the analog input in the same way as previously shown
obstacle = map(obstacle, 0, 10, 0, 100);
differenceBackground = abs(avgBackground - background); //Difference is calculated between current photoresistor
differenceObstacle = abs(avgObstacle - obstacle); //reading and the average calculated during calibration.
Serial.print(differenceBackground);
Serial.print(" ");
Serial.println(differenceObstacle);
if (watch > 60 && //watch is used to make sure the Servo is not overloaded with commands.
(differenceObstacle >= tolerance //Compares difference in photoresistor readings with the inputted
||differenceBackground >= tolerance)) { //tolerance level.
jump();
}
if (watch > 30) { //watch is used instead of delay() to allow the code to keep
myservo.write(0); //running. The Servo needs time to position itself.
}
watch = ++watch; //Add time to the watch
}